

|
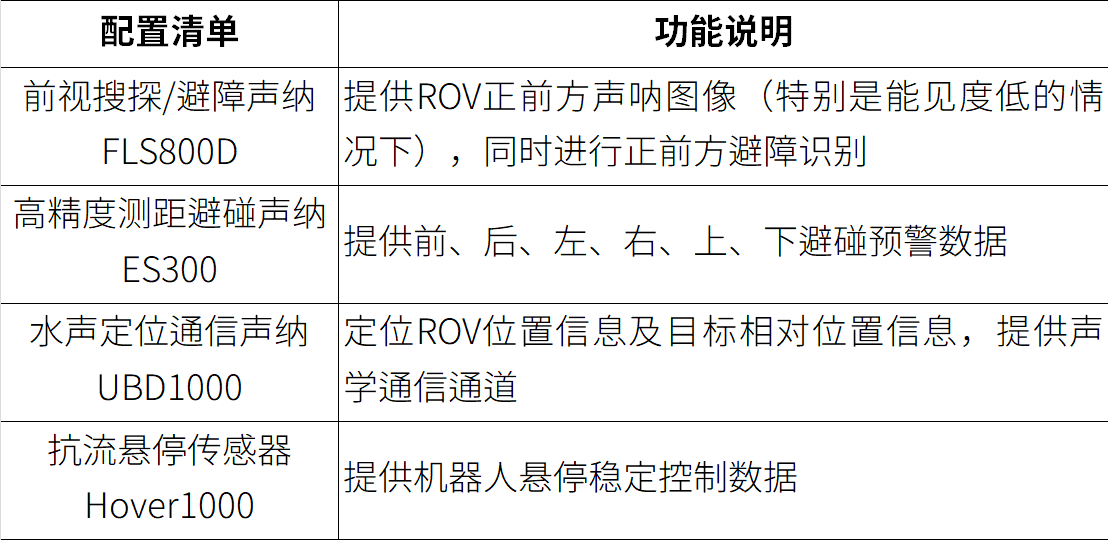
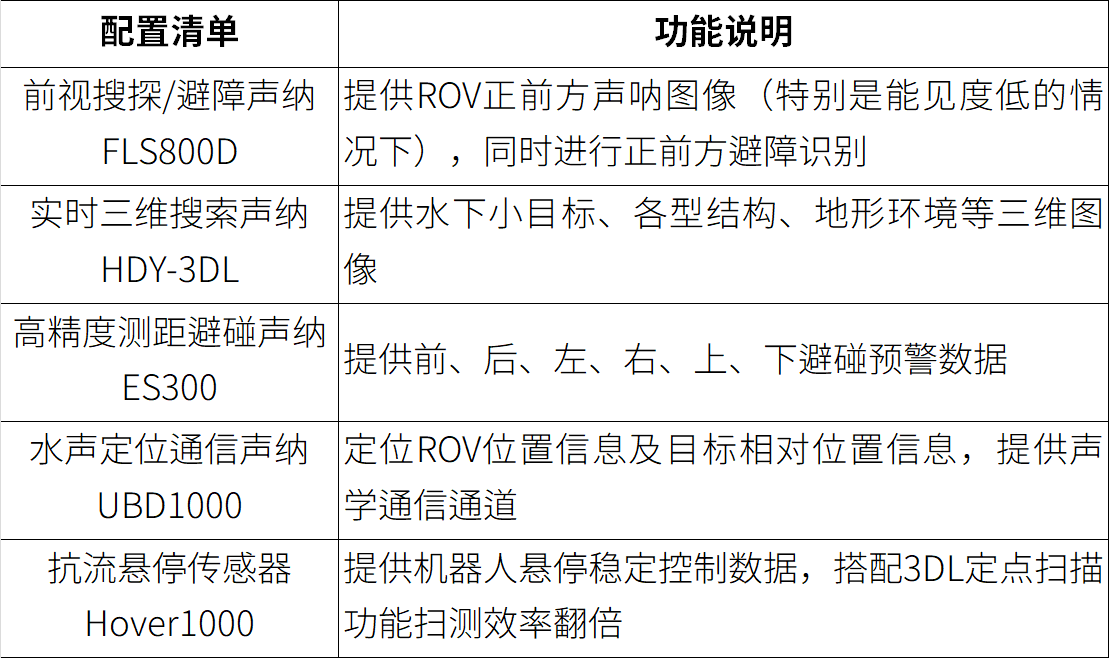
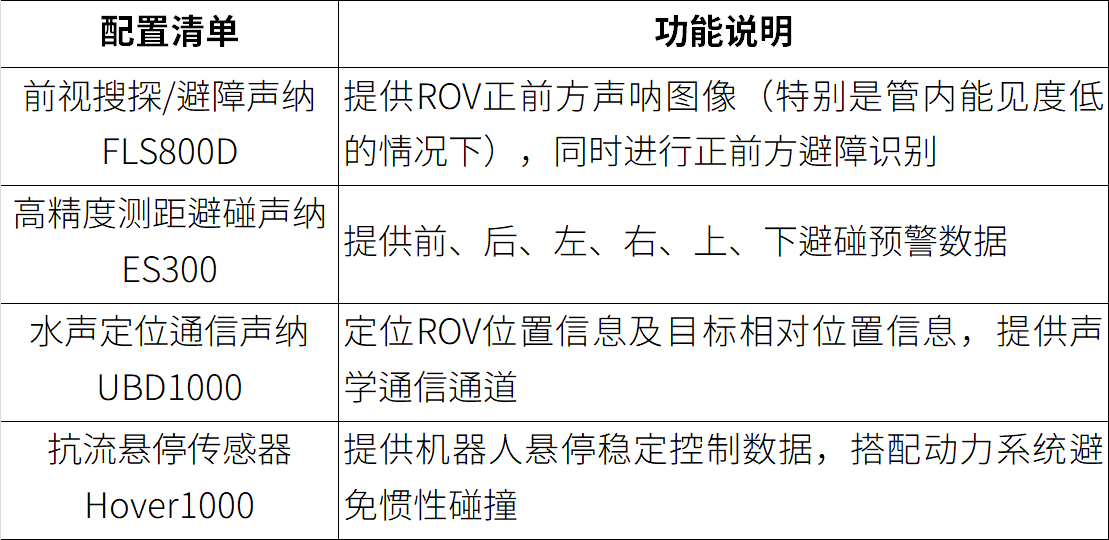
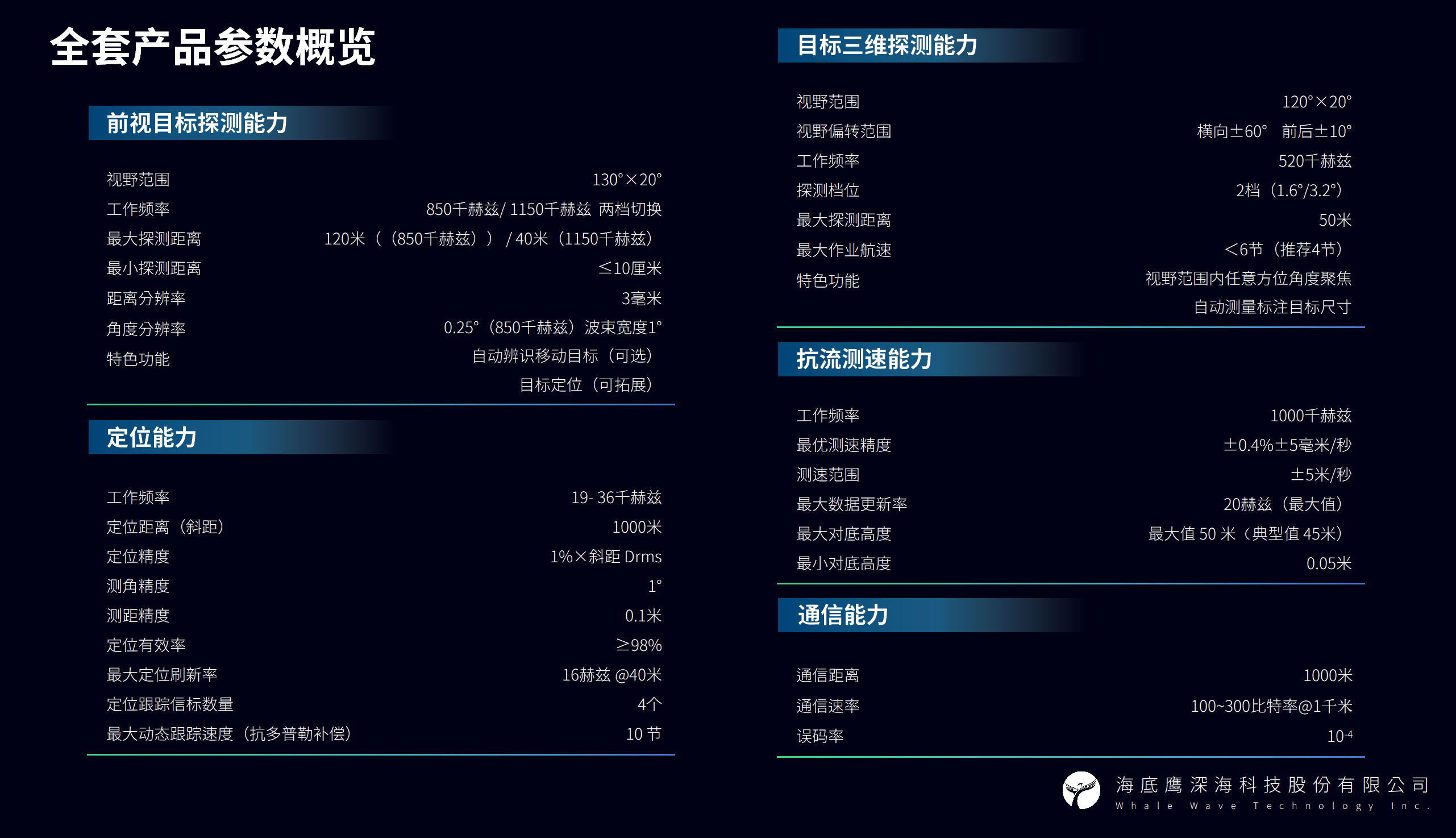
海底鹰水下机器人(ROV)平台应用场景声学方案 一站解决定位/导航/成像/避障/悬停/通信 目前,国内对海洋探索的脚步不断加快,并且不断向大洋更深处挺近。一套好的声学设备,能够为ROV机器人提供定位、导航、成像、避障、悬停和通信功能,让ROV机器人在水下高效开展各类水下作业。 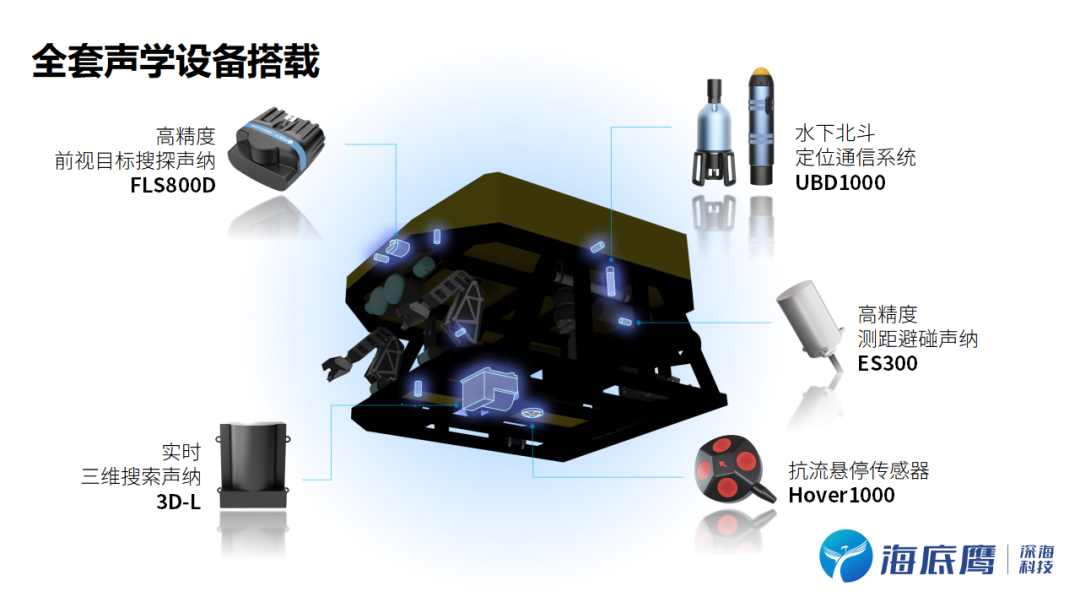 ROV定位/导航/成像/避障/悬停/通信一站解决
 ROV机器人经常需要在水质浑浊、结构复杂的环境中进行目标搜索或人体探测,对于稳定成像能力有较高要求。海底鹰声学图像搜索探测解决方案,针对常规静态目标或动态目标均有非常优秀的成像及辨识能力。
 潜水员在水底以趴卧状态进行扫测测试
工况场景:
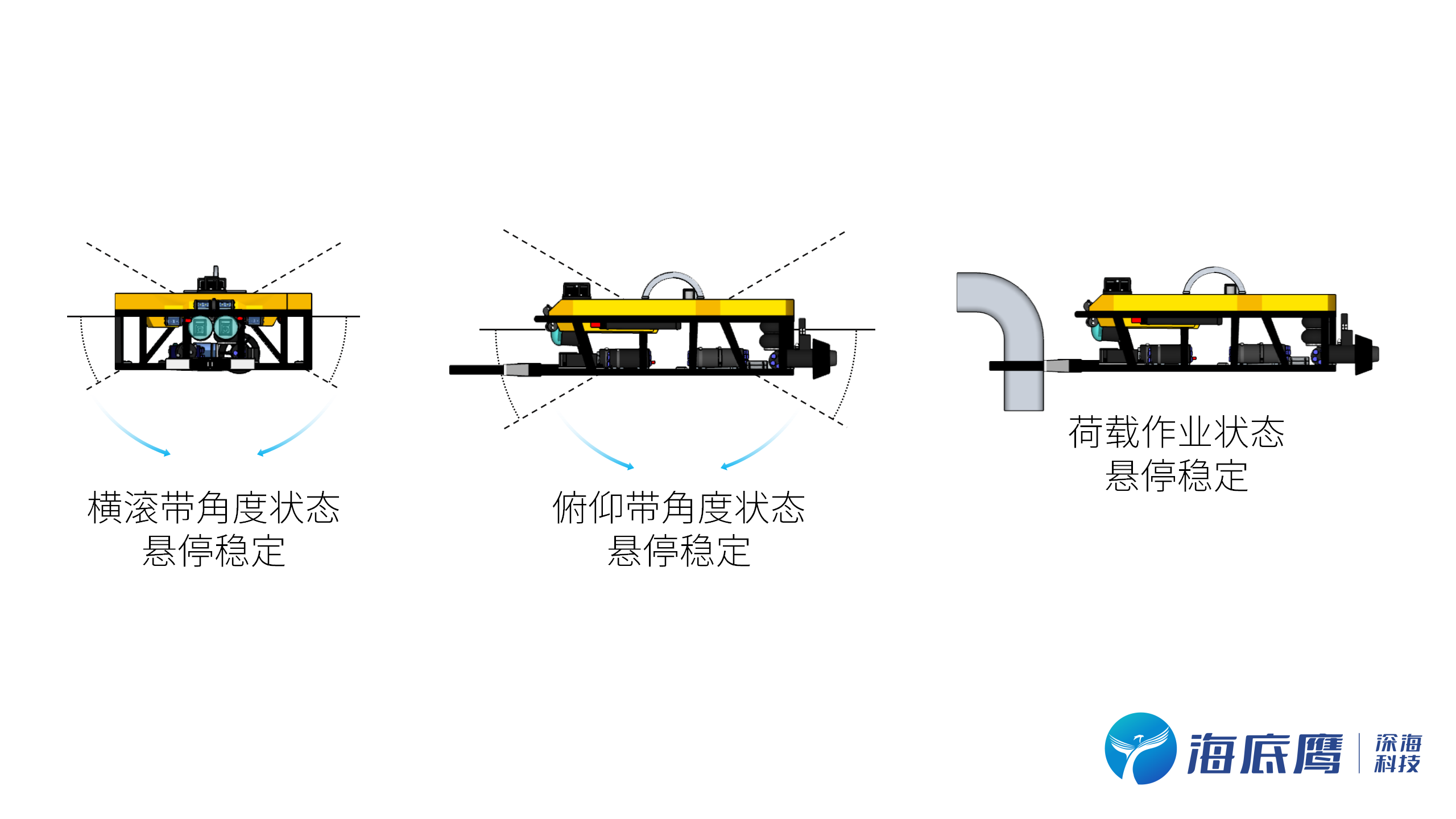
1. 水流、洋流对ROV影响较强,但同时需求ROV在水中固定空间位置悬停;
2. ROV产生荷载、姿态改变后需要在固定坐标位置悬停或按照预定路线移动;
3. ROV需要维持某种特定姿态或角度进行悬停或移动。
  测试员在水下游动测试动态成像效果
  ROV在水下作业中,除了需要抵抗来自6个方向的水流,还需要在各类作业工况下长时间保持稳定且精准的悬停,例如机械手夹取物体、携带挂载物体、姿态改变等。同时需要通过对底高度等信息,结合惯导精确导航至作业坐标。
 工况场景:
1. 水流、洋流对ROV影响较强,但需要ROV在水中稳定且精准的悬停;
2. ROV产生荷载、姿态改变仍需在固定坐标位置悬停或按照预定路线移动。
  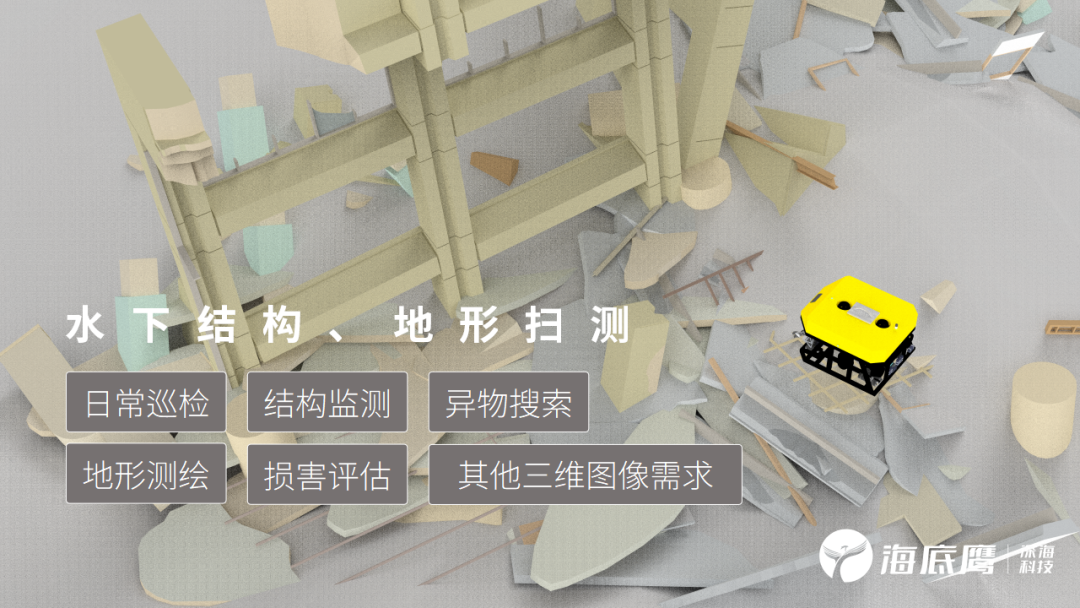 在水下获取目标结构、地形的图像,不仅要求图像清晰,更需要图像输出连续,画面稳定不抖动。海底鹰声学设备图像可懂度高的同时直接生成目标三维图像,可360°无死角查看目标细节。
 水下压缆施工过程监控图像
工况场景:
1. 可在深度≤300米范围内――向下方≤50米范围内寻找小轿车大小或同等大小目标;
2. 可在深度≤300米范围内――向下方≤10米范围内寻找人体大小或同等大小目标。
 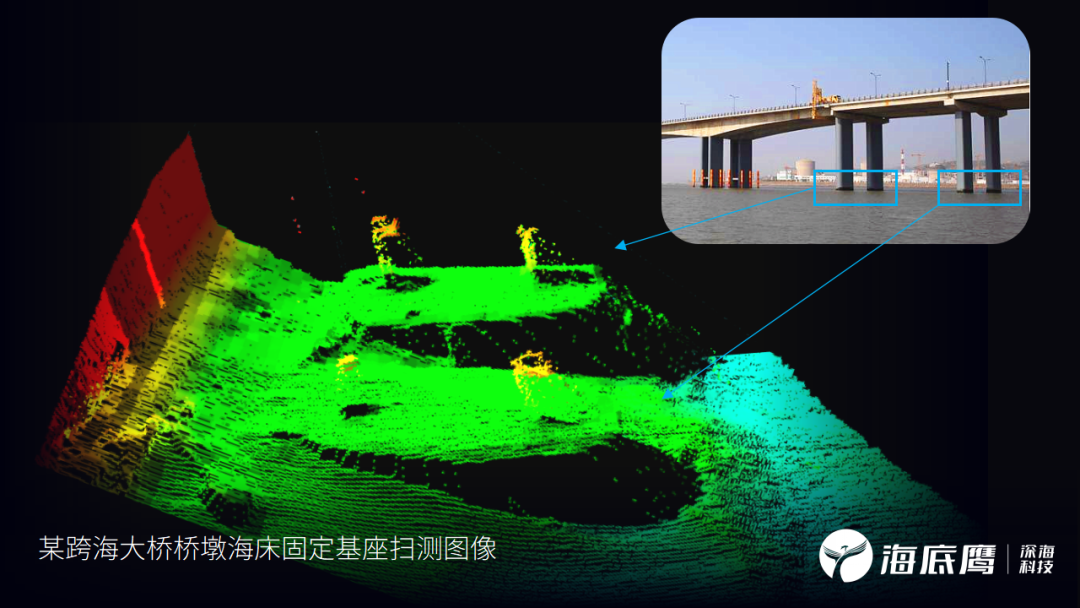 某跨海大桥桥墩固定基座扫测图像 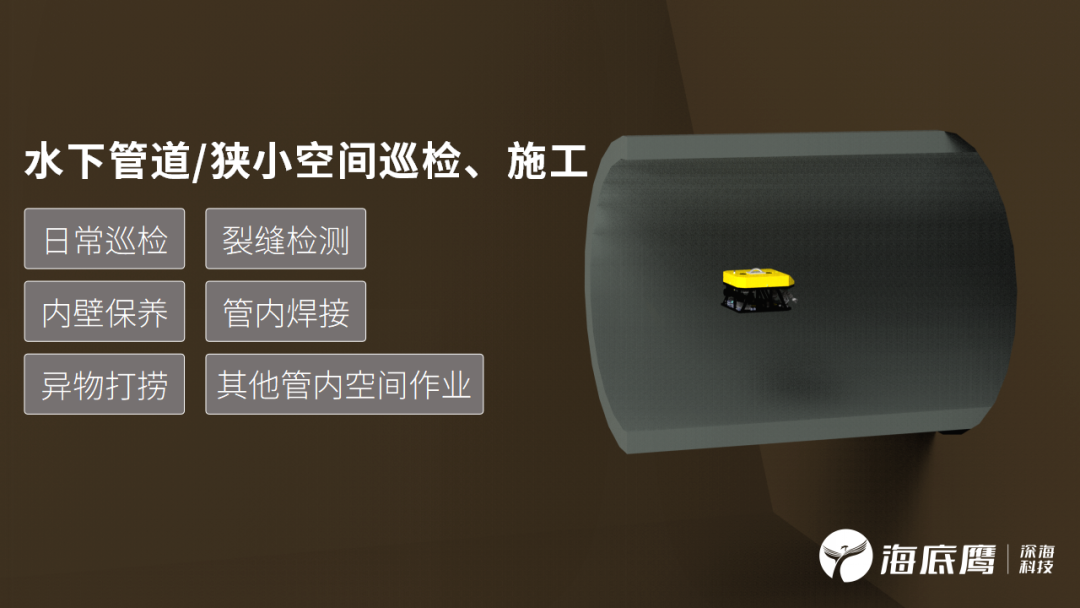 ROV机器人经常需要在管道内部或者在其他狭小空间中施工作业,ROV搭配全套声学设备配合自身软件算法,可在狭小空间中自动避碰避障,并进行稳定悬停,高效开展各类施工作业。
 工况场景:
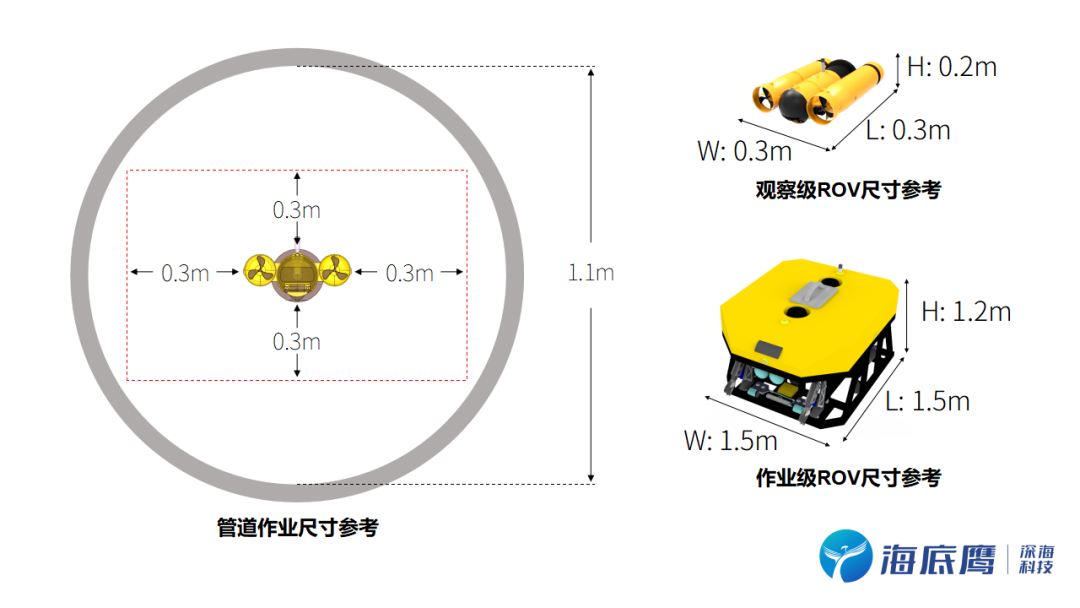
根据ROV尺寸,可在最大深度≤300米,内径≥1.1米的管道内或狭小空间进行巡查、检测或者施工作业。
  |
海底鹰水下机器人(ROV)平台应用场景声学方案
2025/8/11 13:20:21 来源:中国船舶与海洋工程网信息中心
相关热词搜索:
【关闭窗口】【打印该页】
上一篇:招商南油“永盛”轮顺利完成首航墨西哥任务
下一篇:济宁能源集团与江苏省港口集团签订战略合作协议



